配网无人机移动巡检解决方案
一、方案背景
1.背景与需求
(1)行业需求:配电线路无人机巡检的需求主要源于传统人工巡检方式的局限性,以及电力系统对高效、安全、智能化运维的迫切需求。
(2)技术需求:稳定飞行,具备避障能力,避免碰撞导线或障碍物;智能化功能,自主航线规划、一键巡检。
(3)操作需求:简化操作,适配非专业人员,提供自动化任务模式;快速部署,线路巡检,快速转场。
(4)数据管理需求:4G或自组网通信,实时视频或巡检数据实时回传式;数据自动归档,自动完成系统对接。
(5)安全需求:无人机安全接入,身份认证;数据加密传输,防泄露。
(6)环境适应需求:适应城区、山区、农田等多种环境;多机协同作业,提升线路巡检效率。
2.总体思路
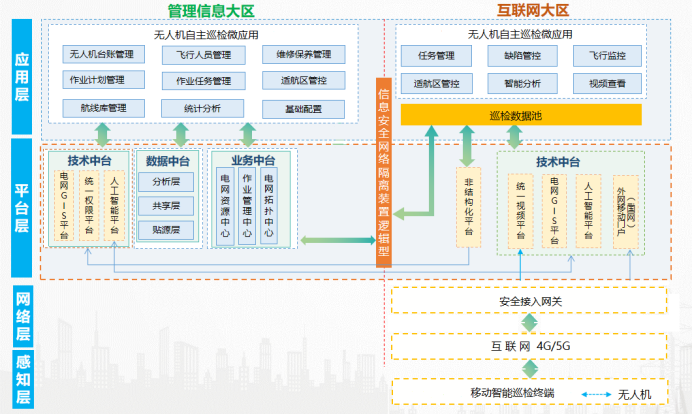
通过应用可灵活机动、快速响应的移动智能巡检终端,结合对接无人机自主巡检微应用、一键自主巡检、边缘计算与轻量化AI模型,构建“巡检计划-任务下发-精准作业-数据归档回传”的全流程闭环。移动智能巡检终端依托智能应用终端、边缘算力及安全链路通信,实现多场景、多环境的移动式自主网格化巡检覆盖,大幅提升偏远区域覆盖能力与应急响应效率,降低专业人员依赖,推动配电巡检向智能化升级。

二、方案设计
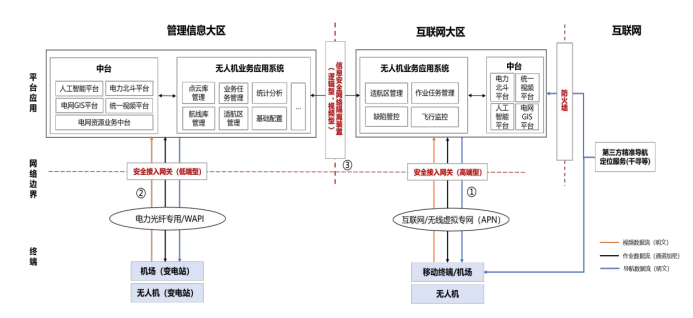
1.系统架构
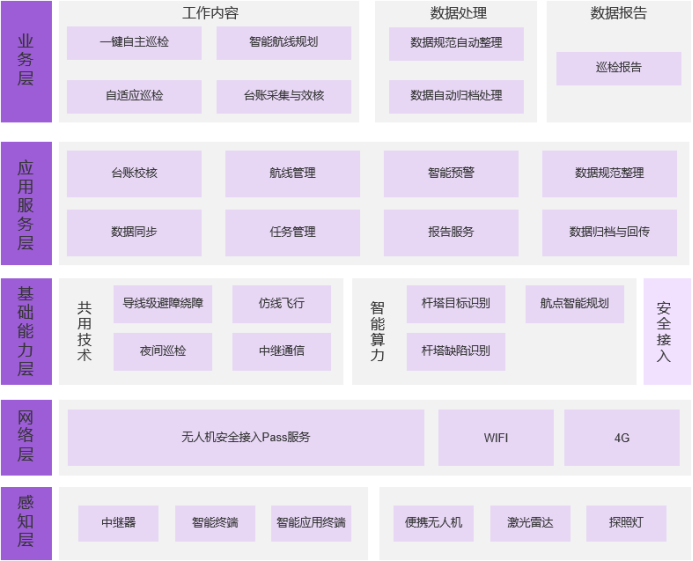
2.关键产品功能架构
3.关键特性
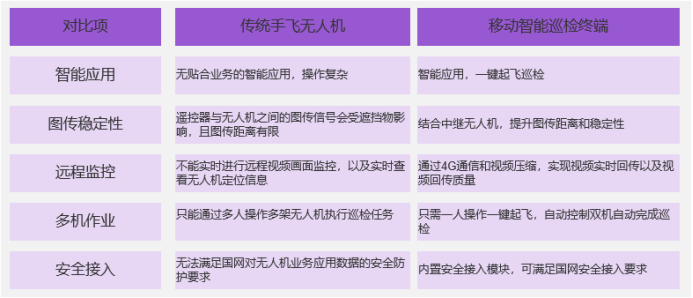
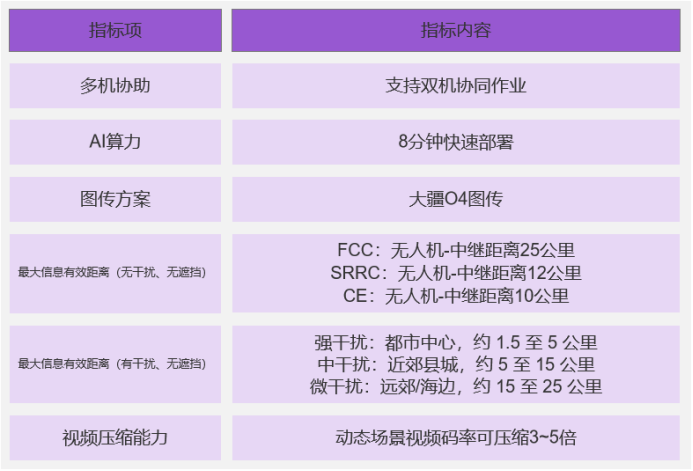
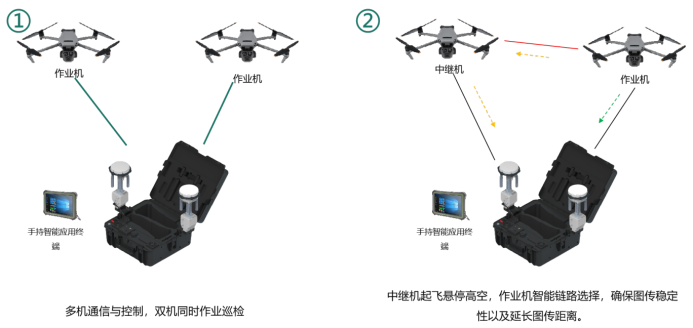
(1)多机协同
(2)安全接入
移动智能巡检终端内置安全接入模块,满足国网对无人机业务应用数据的安全保护要求:双向身份认证、作业数据流加密。
(3)中继组网
在存在山体和建筑物遮挡环境中,无人机的作业能力受到了较大的限制,通过中继组网或灵活中继服务的方式,可有效提升无人机在巡检和应急救援场景的作业能力和范围。
通过移动智能巡检终端的可移动性,以及终端与中继的结合,可以有效提升无人机的覆盖半径。
(4)自主避障与绕障
通过AI视觉技术与激光雷达感知探测技术的结合,实现架空导线、镂空树木等障碍物检测,检测到障碍物后,基于自主避障与绕障技术动态调整飞行策略绕开障碍,进一步保障无人机飞行作业安全。
绕障技术是在自主避障技术的基础上,进一步实现无人机在复杂环境中的自主导航和路径规划。
4.关键技术
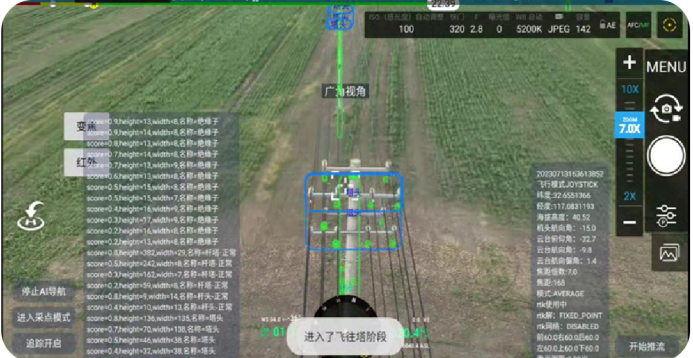
(1)杆塔目标识别
通过移动智能巡检终端自带的智能终端实现基于无人机实时视频进行杆塔识别(输电/配电杆塔)与方向定位,同时通过智能终端控制无人机定点飞行,最终实现无人机沿线路走向自动飞行,并实时识别杆塔。
以上关键技术的实现,可以用于杆塔台账信息智能采集、杆塔航线智能规划等应用。
(2)自适应巡检
采用模型轻量化处理技术,将复杂神经网络模型轻量化部署至机场智能终端,AI能力前置,实现配电杆塔自适应巡检。
(3)视频压缩
依托智能视频编码和AI感知识别技术,采用视频画面 AI感知压缩、视频还原、视频增强等多种综合算法,可对高清视频码率进行压缩,实现 100Kbps 以下的窄带宽情况下清晰、流畅调阅。
三、关键产品功能
1.一键自主巡检
移动智能巡检终端业务系统对接无人机自主巡检微应用,自动获取巡检任务和巡检航线,作业人员在作业现场可快速一键启动巡检,巡检完成后智能终端自动完成数据归档,支持在线回传或离线回传,同时对回传的图像可进行无损压缩。支持单机巡检模式、中继巡检模式、多级巡检模式。

2.远程监控
移动智能巡检终端支持4G回传以及视频无损压缩实现无人机实时画面的远程直播,以及实时位置的远程监控,便于远程管理和指挥无人机的巡检作业。

3.配电杆塔导航点智能标定
配电线路杆塔一般通过航点打点的方式规划航线,移动智能巡检终端内置业务系统基于杆塔识别算法,可自动对某段配电线路的杆塔进行智能航点标定,减少通过人工示教方式进行航点规划的复杂度,同时降低对作业人员的技术要求。
4.杆塔台账智能采集与校验
移动智能巡检终端内置业务系统对接获取杆塔基础台账,同时基于杆塔识别算法,自动采集输电、配电线路杆塔信息,包括杆塔类型、经纬度、高度,采集到的信息与台账既有信息进行比对是否一致,并可由人工复核是否更新台账数据。
5.数据归档
无人机巡检作业后对采集的数据进行整理与归档,主要包括:巡检影像与杆塔或设备关联、图像自动以巡检对象命名、影像按缺陷类型分类、影像按任务作业归类。
四、关键产品优势